English
English 中文简体
中文简体 русский
русский Español
Español عربى
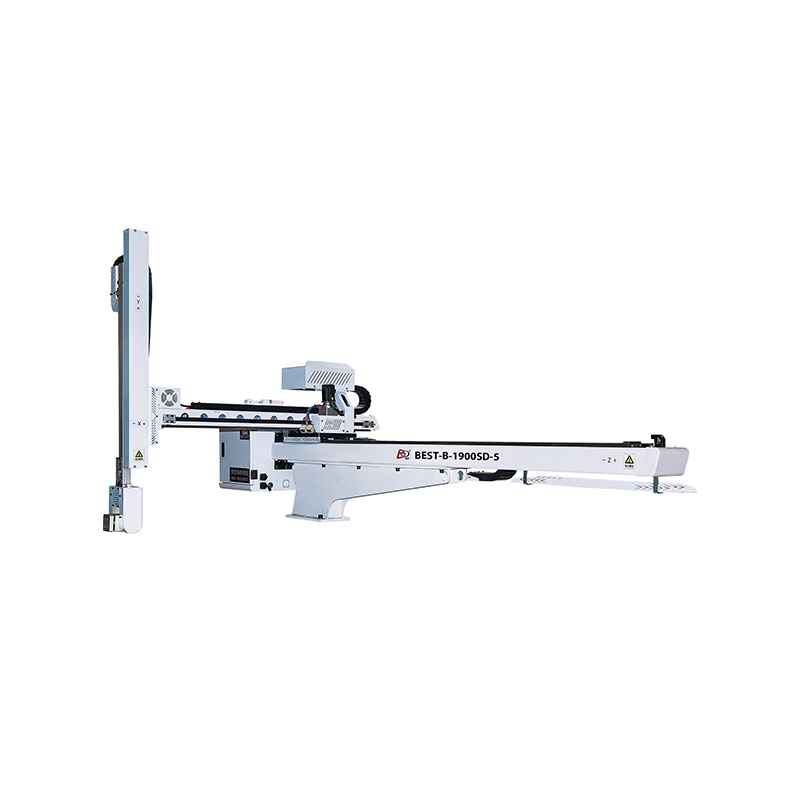
عربىIntelligent manipulators, also known as robotic arms or robotic manipulators, are advanced mechanical systems designed to perform tasks with precision, flexibility, and automation.
Structure:
The structure of intelligent manipulators is pivotal to their functionality. Typically, these manipulators comprise multiple joints and connecting rods arranged in a manner that mimics the human arm's range of motion. Each joint is driven by motors and transmission devices, allowing for individual movement control. This modular design enables the manipulator to adapt to various tasks by adjusting its configuration, making it highly versatile.
The materials used in constructing the manipulator's structure are chosen for their strength, durability, and lightweight properties. This ensures that the manipulator can handle varying loads while maintaining its agility and efficiency.
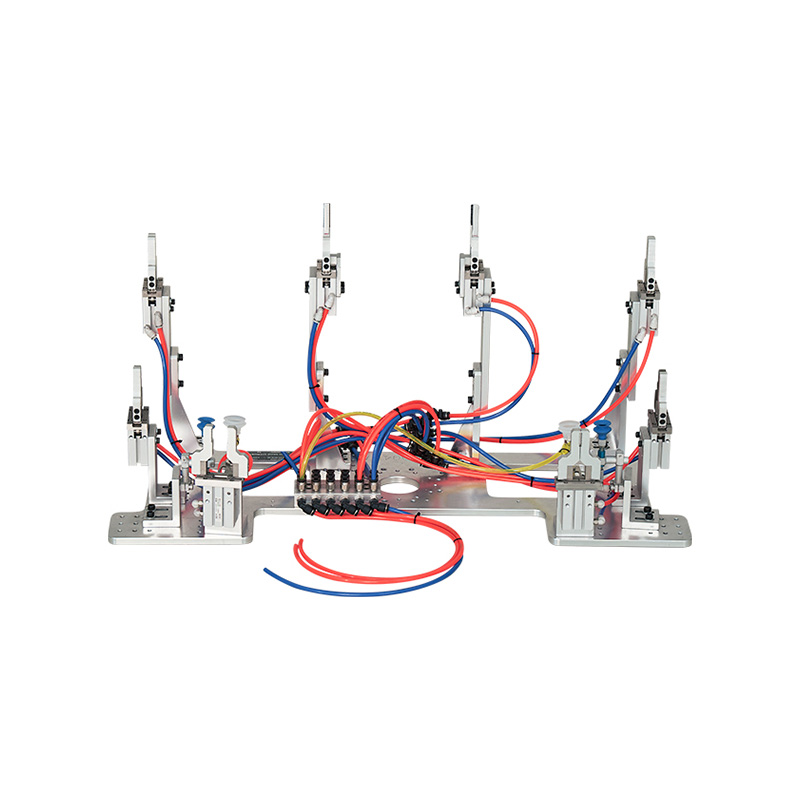
Mechanical Transmission:
Mechanical transmission is crucial for translating the rotational motion of motors into the desired movement of the manipulator's joints. Various transmission devices, such as gears, belts, and pulleys, are employed to achieve this conversion efficiently.
The choice of transmission mechanism depends on the application and required precision. For instance, precision gear systems are used for tasks that demand high accuracy, while belts and pulleys may suffice for less demanding applications. Regardless of the mechanism, the goal is to ensure smooth and precise movement of the manipulator to perform tasks effectively.
Theoretical Mechanics:
Theoretical mechanics provides the mathematical framework for analyzing the motion of intelligent manipulators. Kinematics and dynamics are two branches of theoretical mechanics that play crucial roles in understanding and optimizing manipulator performance.
Kinematics focuses on describing the manipulator's motion without considering the forces involved. It studies the geometric relationships between the manipulator's components, such as joints, links, and end-effectors. By analyzing kinematics, engineers can determine the manipulator's range of motion, speed, and positioning accuracy.
Dynamics, on the other hand, considers the forces and moments acting on the manipulator. It delves into how external forces affect the manipulator's movement and stability. Understanding dynamics is essential for ensuring that the manipulator can handle loads safely and maintain stability during operation.
Control System:
The control system is the brain of an intelligent manipulator, orchestrating its movements and operations. It comprises hardware and software components that work together to achieve precise control over the manipulator's motors and actuators.
Modern control systems often integrate sensors to provide feedback on the manipulator's position, speed, and load. This real-time feedback allows the control system to adjust the manipulator's movements dynamically, ensuring ideal performance and safety.
Programming technology plays a crucial role in defining the manipulator's behavior based on task requirements. By programming sequences of movements and operations, engineers can automate the manipulator's tasks, making it capable of performing complex operations without human intervention.
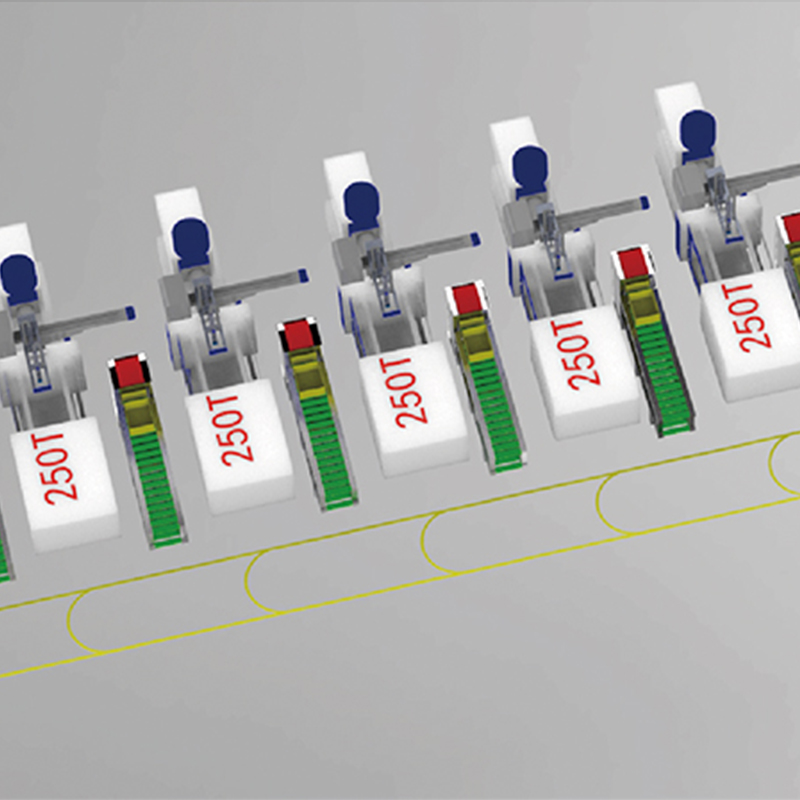
The mechanical principle of an intelligent manipulator is a harmonious integration of its structure, mechanical transmission, theoretical mechanics, and control system. This comprehensive approach enables the manipulator to achieve flexible movement, precise operation, and automation, making it a valuable asset in various industries, from manufacturing and logistics to healthcare and research. As technology continues to advance, so too will the mechanical principles that drive intelligent manipulators, paving the way for even more sophisticated and capable robotic systems in the future.